
Nieuwegein
23 Jun. 2009
1 minuut
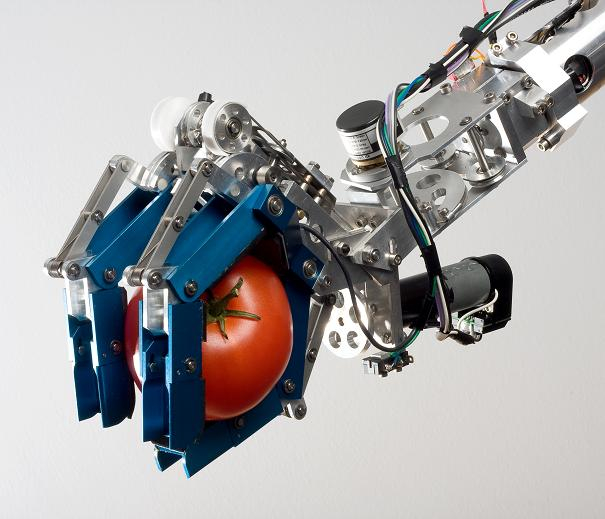
De menselijke grijper op een robot komt steeds dichterbij. Vorige week op Vision & Robotics 2009 toonde de TU Delft een 3-vingerige robotgrijper die ongeacht de vorm een product kan vastnemen.
Deze grijper is onderdeel van de ontwikkeling van een lopende robot waaraan het onderzoeksteam van het Delft Biorobotic Laboratory werkt. De onderzoekers laten zich inspireren door het menselijk lichaam. ‘De mens heeft niet veel kracht nodig om een voorwerp vast te pakken, ongeacht de vorm. Vanuit één pees worden de verschillende vingerkootjes aangestuurd. Dat hebben we bij deze grijper willen nabouwen’, verduidelijkt Martijn Wisse van het laboratorium.
Kleine elektromotor
In de speciale grijper zit slechts één kleine elektromotor die alle drie de vingers aanstuurt. Er zitten geen sensoren in de vingers (wel een centrale druksensor), maar er wordt met een constante kracht gedrukt. Met 5 N drukkracht kunnen de vingers verschillende voorwerpen oppakken, van een kopje en een appel tot een ei.
In de praktijk kan met deze compacte grijper aan een robotarm een gewicht van 8 kilogram worden opgetild.
Doordat met een constante kracht wordt gedrukt, is de constructie van de grijper relatief eenvoudig en compact. De clou zit in het speciale scharniermechanisme dat de Delftse onderzoekers hebben ontwikkeld en de manier waarop de elektromotor de drie vingers aanstuurt. De grijper heeft drie keer twee vrijheidsgraden en weget slechts 6 ons.
Toepassingen ontwikkelen
Op Vision & Robotics toonde het Delft Biorobotic Laboratory het eerste prototype van de grijper. ‘Toepassingen hebben we nog niet. Daarvoor staan we op deze beurs’, aldus Wisse. ‘We willen samen met de industrie toepassingen voor deze nieuwe grijper ontwikkelen en testen.’
Anderen lazen ook

